The future that is Robotics.
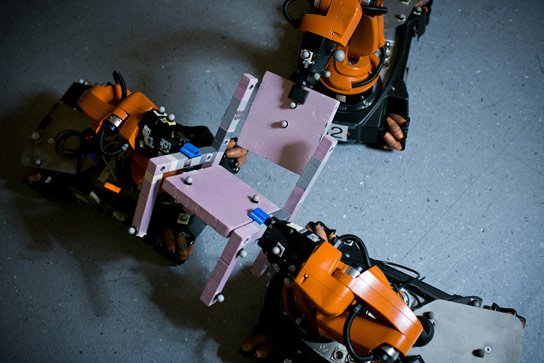 Researchers from MIT have developed a new algorithm that lets autonomous robots divvy up assembly tasks on the fly, an important step forward in multirobot cooperation.
Researchers from MIT have developed a new algorithm that lets autonomous robots divvy up assembly tasks on the fly, an important step forward in multirobot cooperation.
Today’s industrial robots are remarkably efficient — as long as they’re in a controlled environment where everything is exactly where they expect it to be.
But put them in an unfamiliar setting, where they have to think for themselves, and their efficiency plummets. And the difficulty of on-the-fly motion planning increases exponentially with the number of robots involved. For even a simple collaborative task, a team of, say, three autonomous robots might have to think for several hours to come up with a plan of attack.
This week, at the Institute for Electrical and Electronics Engineers’ International Conference on Robotics and Automation, a group of MIT researchers were nominated for two best-paper awards for a new algorithm that can significantly reduce robot teams’…
View original post 878 more words
